|
Robot finger for Violin fingering
|
- The proposed robot hand will generate a more accurate sound by controlling the pressing force applied to a violin string during violin playing by the violin-playing robot.
- The effectiveness of the proposed robot hand is demonstrated by comparing the quality of sound generated by it with the that generated via violin fingering by an actual violinist on the basis of the existing sound quality rating system.
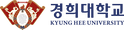
Design of Robot Finger
- The actual human finger consists of three joints: the metacarpophalangeal (MCP) joint, the proximal interphalangeal (PIP) joint, the distal interphalangeal (DIP) joint.
- The MCP joint has 2DoF—pitch and yaw—and the PIP and DIP joints have a dependent relationship, and they are characterized by 1 DoF each in the pitch direction.
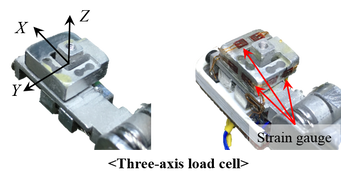
- When the motor installed in the finger spins, both the DIP and the PIP joints bend simultaneously, similar to the movement of a human finger.
- The motor installed inside the finger is a DC-geared motor, having a gear ratio of 324:1, maximum torque of 30 mNm, and maximum speed of 15 rpm.
|
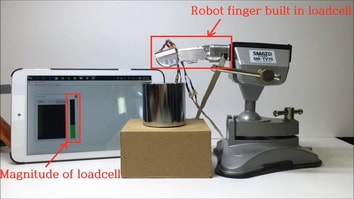
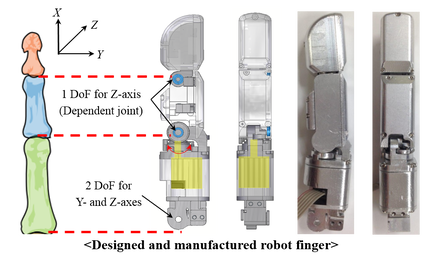
<Test enviroment of three-axis load cell>
|
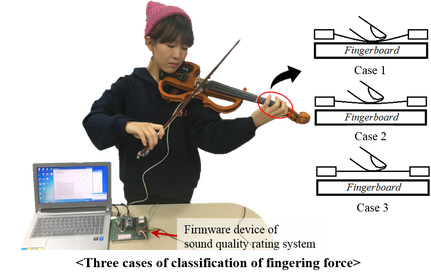
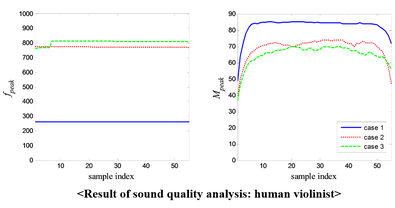
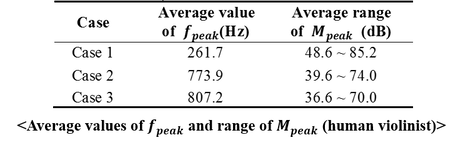
Sound quality analysis: human violinist
- In order to verify that the tone of the violin’s sound changes depending on how hard the strings are pressed, three cases of fingering force are classified.
- The violin is played at the standard fourth-octave C-note. The sound quality rating system then numerically expresses the aspirate frequency and magnitude.
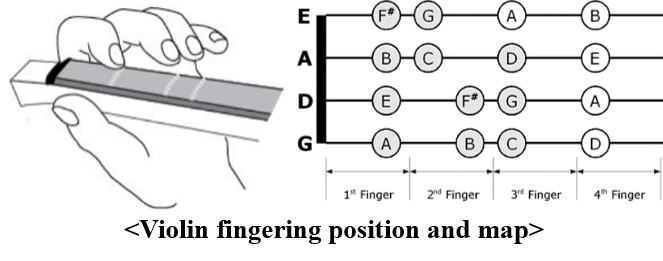
- According to the frequency scale(as shown , the frequency of the fourth-octave C-note is 261.6 Hz.
- In cases 1-3, case 1, with an average value of (261.7 Hz), is the closest to the quality rating result of 261.6 Hz.
- Therefore, to perform the most accurate sound, the developed robot must exert the same force as case 1.
|
|
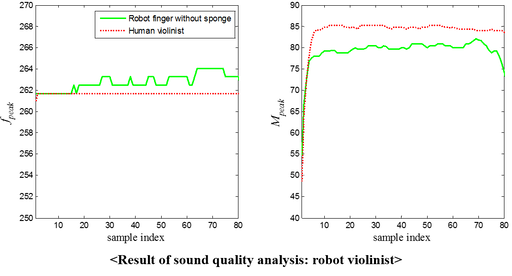
Sound quality analysis: robot finger
- In order to find out whether the developed robot finger produces the same performance sound as when a human violinist presses the violin strings, a sound quality-rating test is implemented.
- Utilizing the fourth-octave C note as the standard note, the violin string is pressed according to the same testing condition as case 1.
- Then, in the same manner as the human violinist test, the sound quality assessment uses the sound quality rating system and the test is implemented upon constructing a jig on the violin.
- At this point, the figure "Result of sound quality analysis: robot violinist" indicates the aspirate frequency (fpeak), and unlike when the human violinist perform the violin, the results show that the aspirate frequency of when the robot finger performs changed at every moment. It is not possible to state that an accurate sound was performed.

|
|
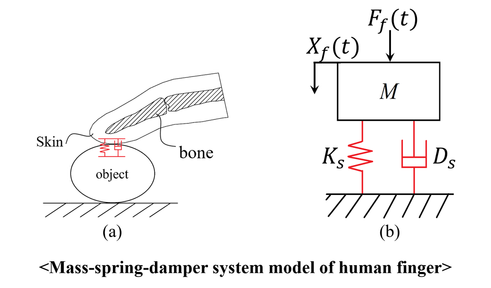
Mechanical impedance modeling of human finger
- The sound quality rating result of robot finger, there is disadvantage about aspirate frequency changing at every moment. It is caused by difference in structure of a robot finger and a human finger. Violin is played by producing vibration from the friction of the bowstrings.
- Since the proposed robot finger is made of metal, the vibration caused by the friction of the string and the bow with the robot finger causes resonance, which results in the generation of inaccurate sound.
- Then, in the same manner as the human violinist test, the sound quality assessment uses the sound quality rating system and the test is implemented upon constructing a jig on the violin.
- In the case of the human violinist, the bone of the hand is surrounded by outer skin, which reduces the vibration caused by the friction of the string and bow to generate accurate sound.
- The outcome of a human finger pressing the strings of a violin is explained with the mass-spring-damper system model.
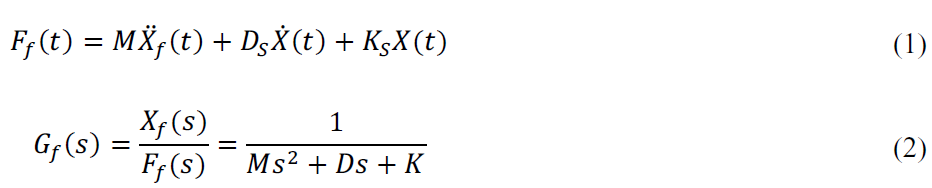
- The free-body diagram (FBD) of the mass-spring-damper system can be expressed in figure (b), where F_f(t) is the human finger force and X_f(t) is the displacement of F_f(t), M, K_s and D_s , which are finger mass, stiffness, and damper of finger, respectively. The dynamic equation of this system is as follows:
|
|
- Eq. (1) is represented by the transfer function, as shown eq. (2). Thus, when human violinist plays the violin, the dynamic characteristics the human finger possesses prevent it from having the same adverse effects caused by resonance, unlike the robot finger.
- To reflect these dynamic characteristics, poly-urethane foam is attached to the surface of the robot finger. And it is implemented to sound quality analysis. The results are shown as:
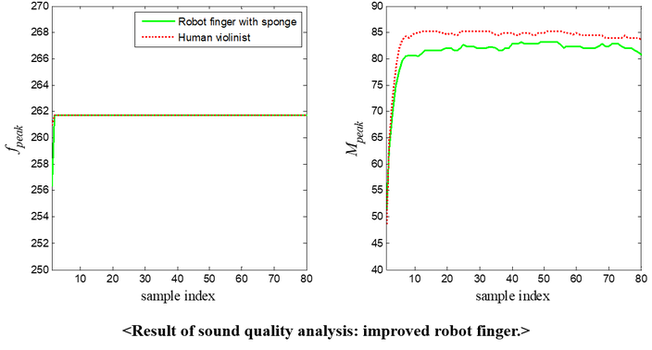

- The aspirate frequency graph is consistent with performance sound of robot finger and human violinist. This result shows that the performance sound of robot finger was very accurate.
- However, the magnitude of performance sound of robot finger is still comparatively smaller than one of the human violinist. Therefore, we should be compensated about this.
|
|
|
|