Research of Mobile Manipulator
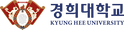
- Platform
|
|
- Work
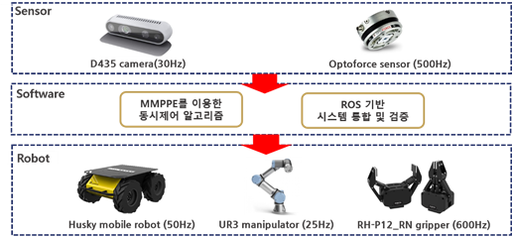
- Construction of Mobile Manipulator simulation environment using Gazebo.

<simulation in gazebo>
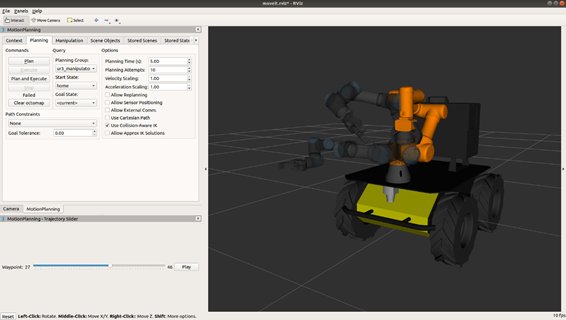
2. Dynamic control algorithm research of mobile manipulator.
|
|

<Sequential control>

<Dynamic control>

<Dynamic control algorithm Result>
|
Quantitatively compared the operating time and the error of the target position of the end effector.
The proposed dynamic algorithm using MMPPE is about 45% more time efficient than the sequential control method, and the distance error is about 0.07m, maintaining high accuracy. |
3. Navigation in indoor environment

<SLAM performed inside the lab>
|
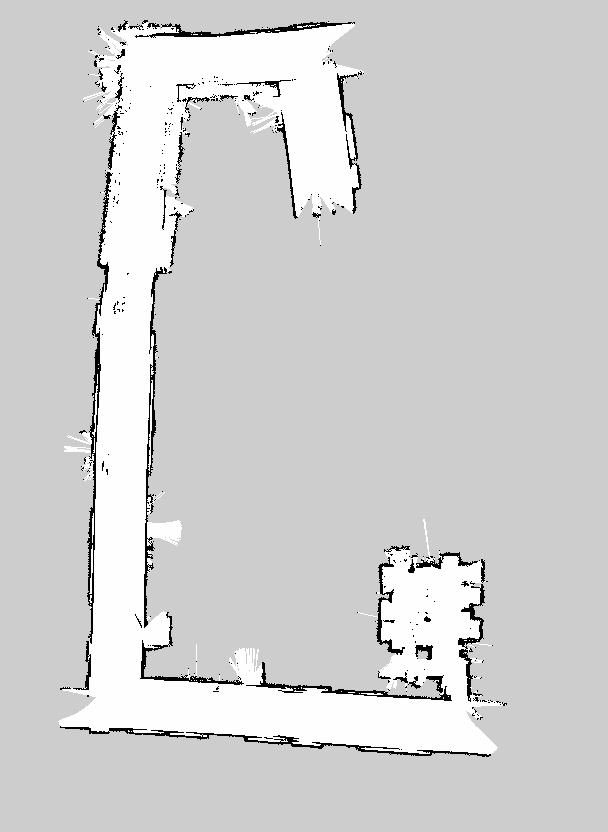
<SLAM performed inside the building>
|